When running production workloads on virtualized infrastructure like Harvester, memory management is critical. In Harvester versions prior to v1.4.0, certain workloads experienced sudden Virtual Machine (VM) terminations due to the host Linux operating system triggering Out-Of-Memory (OOM) kills.
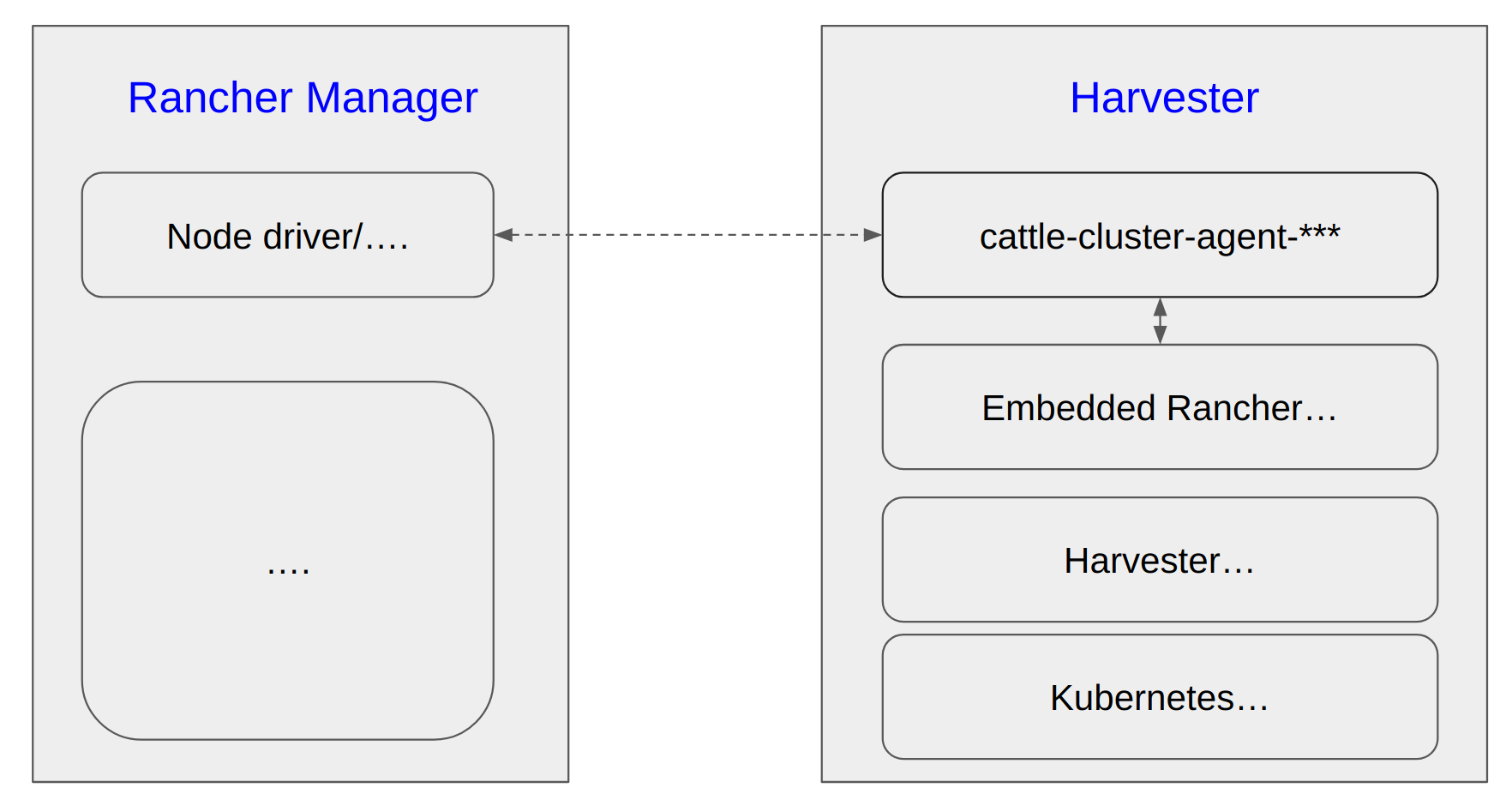
What is KubeVirt? Harvester uses KubeVirt as its core virtualization engine. KubeVirt is an open-source technology that allows Kubernetes to run and manage traditional Virtual Machines inside standard containers, translating VM specifications directly into Pod configurations.
This article explores why these OOM events occur in a Kubernetes-native virtualization environment and how Harvester provides granular tools to eliminate them.
Anatomy of a VM OOM Event
When a VM is terminated due to insufficient memory at the host level, the Linux kernel logs specific keywords that help pinpoint the fault. In Harvester, these logs generally fall into two distinct categories depending on which process triggered the exhaustion.
Example 1: virt-launcher invoked oom-killer
The virt-launcher process runs inside the dedicated Kubernetes Pod backing the VM. If this component or its direct sub-processes run out of the memory allocated to their cgroup, the kernel triggers a memory cgroup (memcg) OOM event.
Feb 03 19:57:08 ** kernel: virt-launcher invoked oom-killer: gfp_mask=0xcc0(GFP_KERNEL), order=0, oom_score_adj=986
Feb 03 19:57:08 ** kernel: CPU: 40 PID: 40785 Comm: virt-launcher Tainted: G I X 5.14.21-150400.24.60-default #1 SLE15-SP4 9096397fa6646928cc6d185ba417f2af65b536f1
...
Feb 03 19:57:08 ** kernel: memory: usage 17024340kB, limit 17024340kB, failcnt 1243
Feb 03 19:57:08 ** kernel: memory+swap: usage 17024340kB, limit 9007199254740988kB, failcnt 0
Feb 03 19:57:08 ** kernel: kmem: usage 143556kB, limit 9007199254740988kB, failcnt 0
Feb 03 19:57:08 ** kernel: Memory cgroup stats for /kubepods.slice/kubepods-burstable.slice/kubepods-burstable-pod968a06fb_9ab9_4819_8caf_0392ddff3d9b.slice:
...
Feb 03 19:57:08 ** kernel: Tasks state (memory values in pages):
Feb 03 19:57:08 ** kernel: [ pid ] uid tgid total_vm rss pgtables_bytes swapents oom_score_adj name
Feb 03 19:57:08 ** kernel: [ 38886] 0 38886 243 1 28672 0 -998 pause
Feb 03 19:57:08 ** kernel: [ 38917] 0 38917 310400 6921 192512 0 986 virt-launcher-m
Feb 03 19:57:08 ** kernel: [ 38934] 0 38934 1200940 25126 954368 0 986 virt-launcher
Feb 03 19:57:08 ** kernel: [ 38951] 0 38951 386525 8247 466944 0 986 libvirtd
Feb 03 19:57:08 ** kernel: [ 38952] 0 38952 33619 3940 290816 0 986 virtlogd
Feb 03 19:57:08 ** kernel: [ 39079] 107 39079 4457263 4201766 34439168 0 986 qemu-system-x86
Feb 03 19:57:08 ** kernel: oom-kill:constraint=CONSTRAINT_MEMCG,nodemask=(null),cpuset=cri-containerd-0f32894de86edf3d3832702af794874ef8d400b4969acdea4976b12040756e0d.scope,mems_allowed=0-1,oom_memcg=/kubepods.slice/kubepods-burstable.slice/kubepods-burstable-pod968a06fb_9ab9_4819_8caf_0392ddff3d9b.slice,task_memcg=/kubepods.slice/kubepods-burstable.slice/kubepods-burstable-pod968a06fb_9ab9_4819_8caf_0392ddff3d9b.slice/cri-containerd-0f32894de86edf3d3832702af794874ef8d400b4969acdea4976b12040756e0d.scope,task=qemu-system-x86,pid=39079,uid=107
Example 2: CPU X/KVM invoked oom-killer
This occurs when a vCPU execution thread inside qemu-system-x86_64 attempts a memory operation that pushes the entire container beyond its Kubernetes memory limit.
[Thu May 9 14:52:38 2024] CPU 11/KVM invoked oom-killer: gfp_mask=0xcc0(GFP_KERNEL), order=0, oom_score_adj=830
[Thu May 9 14:52:38 2024] CPU: 60 PID: 70888 Comm: CPU 11/KVM Not tainted 5.3.18-150300.59.101-default #1 SLE15-SP3
...
[Thu May 9 14:52:38 2024] memory: usage 67579904kB, limit 67579904kB, failcnt 67391
[Thu May 9 14:52:38 2024] memory+swap: usage 0kB, limit 9007199254740988kB, failcnt 0
[Thu May 9 14:52:38 2024] kmem: usage 633636kB, limit 9007199254740988kB, failcnt 0
...
[Thu May 9 14:52:38 2024] Tasks state (memory values in pages):
[Thu May 9 14:52:38 2024] [ pid ] uid tgid total_vm rss pgtables_bytes swapents oom_score_adj name
[Thu May 9 14:52:38 2024] [ 70675] 0 70675 243 1 28672 0 -998 pause
[Thu May 9 14:52:38 2024] [ 70728] 0 70728 310400 5467 188416 0 830 virt-launcher-m
[Thu May 9 14:52:38 2024] [ 70746] 0 70746 1242373 25104 1073152 0 830 virt-launcher
[Thu May 9 14:52:38 2024] [ 70762] 0 70762 455279 14110 770048 0 830 libvirtd
[Thu May 9 14:52:38 2024] [ 70763] 0 70763 37704 3916 339968 0 830 virtlogd
[Thu May 9 14:52:38 2024] [ 70870] 107 70870 18302464 16718510 135278592 0 830 qemu-system-x86
[Thu May 9 14:52:38 2024] oom-kill:constraint=CONSTRAINT_MEMCG,nodemask=(null),cpuset=cri-containerd-100093783c22a3ae1a42e21dd887b7c26eef52d56ba44c7273ef54507b6efe7c.scope,mems_allowed=0-3,oom_memcg=/kubepods.slice/kubepods-burstable.slice/kubepods-burstable-podef91e487_dec5_4613_800b_eb23e1a1617d.slice,task_memcg=/kubepods.slice/kubepods-burstable.slice/kubepods-burstable-podef91e487_dec5_4613_800b_eb23e1a1617d.slice/cri-containerd-100093783c22a3ae1a42e21dd887b7c26eef52d56ba44c7273ef54507b6efe7c.scope,task=qemu-system-x86,pid=70870,uid=107
[Thu May 9 14:52:38 2024] Memory cgroup out of memory: Killed process 70870 (qemu-system-x86) total-vm:73209856kB, anon-rss:66852088kB, file-rss:21948kB, shmem-rss:4kB
[Thu May 9 14:52:38 2024] oom_reaper: reaped process 70870 (qemu-system-x86), now anon-rss:0kB, file-rss:132kB, shmem-rss:4kB
Root Cause: Native Hypervisors vs. Harvester Architecture
Traditional Linux Host (e.g., Virtual Machine Manager)
On a standard Linux host, a VM managed via QEMU/KVM runs inside a systemd machine.slice. The hypervisor process (qemu-system-x86_64) has access to the host's wider pool of resources, managed loosely unless strict cgroup limits are manually added.
$ systemd-cgls
Control group /:
-.slice
├─1173 bpfilter_umh
├─system.slice
└─machine.slice
└─machine-qemu\x2d1\x2dharv41.scope
└─8632 /usr/bin/qemu-system-x86_64 -name guest=harv41,debug-threads=on -S -…
Harvester (Kubernetes/KubeVirt Engine)
In Harvester, every VM is encapsulated inside a Kubernetes Pod. This introduces a strict cgroup boundary (kubepods.slice).
As shown below, multiple helper processes must live alongside the primary qemu-system-x86_64 process within the same tightly limited container memory budget:
-.slice
└─kubepods.slice
│ ├─kubepods-burstable-pod99ee3a64_645b_4699_9384_5a3875d78b41.slice
│ │ ├─cri-containerd-0c316eb8a4711bff1ce968b46ddb658e49378897454b4caf2a20704c808f33f1.scope …
│ │ │ └─ 8505 /pause
│ │ ├─cri-containerd-eb5deef29f064adfd2456d9f9c535674ac4d0c95c81b13afbdab5a89dc6a774b.scope …
│ │ │ └─ 8590 /usr/bin/virt-tail --logfile /var/run/kubevirt-private/2ce151aa…
│ │ └─cri-containerd-fd57a5cfc2b9b1f53eaf7b575c3273e6784f4c56a04a17d502ecfbd19e55b066.scope …
│ │ ├─ 8542 /usr/bin/virt-launcher-monitor --qemu-timeout 301s --name vm2 -…
│ │ ├─ 8558 /usr/bin/virt-launcher --qemu-timeout 301s --name vm2 --uid 2ce…
│ │ ├─ 8591 /usr/sbin/virtqemud -f /var/run/libvirt/virtqemud.conf
│ │ ├─ 8592 /usr/sbin/virtlogd -f /etc/libvirt/virtlogd.conf
│ │ └─ 8823 /usr/bin/qemu-system-x86_64 -name guest=default_vm2,debug-threa…
The "Hidden" Memory Overhead
Breaking Down the Memory Overhead Buffer
When you define a virtual machine, for example, a VM configured with 4 vCPUs, 2 GiB of memory, and 1 Ethernet interface, KubeVirt does not just allocate exactly 2 GiB of memory to the container.
Instead, KubeVirt calculates an additional baseline memory overhead required to operate the virtualization stack. This overhead budget covers:
- CPU Simulators: Thread pools tracking guest state and handling context switches.
- Memory Management: Tracking structures such as QEMU page tables mapping guest RAM.
- Auxiliary Devices: Buffers for virtual network interfaces (NICs), storage queues, and video devices.
The High Stakes of VM OOM Kills
Depending on the guest OS type, specific kernel workloads, and heavy storage/network I/O spikes, the memory consumed by these helper tasks can quickly exceed KubeVirt's default calculations. Because Kubernetes enforces a strict hard ceiling on the Pod container, the entire container triggers a CONSTRAINT_MEMCG OOM kill the moment this boundary is breached.
Unlike traditional, stateless Kubernetes workloads where a container crash is quickly mitigated by a rapid pod restart, an OOM kill on a VM pod carries severe operational consequences:
Prolonged Downtime: A virtual machine is a stateful workload. It does not instantaneously serve traffic upon a container restart; it must undergo a full operating system boot cycle, run init scripts, and re-initialize services, drastically extending your Recovery Time Objective (RTO).
Risk of Data Corruption: Sudden terminations during flight can abruptly cut off active storage queues. If the guest OS or database engine is in the middle of a critical write operation when the host terminates the
qemuprocess, it can result in uncommitted journals, filesystem degradation, or severe data corruption on your persistent volumes.
The Solution: Tunable Memory Architectures
To address this, Harvester introduced dual-layer configurations that give administrators full flexibility over how overhead buffers are calculated.
Global Adjustment: additional-guest-memory-overhead-ratio
This cluster-wide setting functions as a multiplier for KubeVirt's automatically calculated memory overhead. For deep structural details, refer to the Harvester Advanced Documentation.
- Definition: Scales the calculated overhead buffer to accommodate heavy I/O or virtualization tasks.
- Default Value:
1.5(Provides a 50% safety cushion above baseline calculations). - Valid Range:
0or1.0to10.0.
💡 Important Operational Notes:
- Lifecycle Impact: Changes to this setting only apply to newly created virtual machines or existing VMs after they undergo a migration or a full power cycle.
- System Overhead: A higher ratio increases the host container's memory allocation, guaranteeing safety for heavy workloads but scaling up the overall system resource reservation footprint.
- Resource Allocation Trade-off: Setting this ratio excessively high can lock up unneeded host memory blocks, leading to predictable underutilization and significant memory waste across your compute nodes.
Per-VM Optimization: Reserved Memory
For specific virtual machines running intensive or non-standard workloads, a global multiplier might not offer the precision required. Harvester allows administrators to define a dedicated Reserved Memory value directly on individual VMs. For complete configuration steps, see the Harvester VM Management Documentation.
⚠️ Under the Hood Memory Carving: When you configure this setting, Harvester explicitly scales down the available memory presented to the Guest OS inside the VM. For example, if a VM is configured with 2 GiB of memory and you set a Reserved Memory value of 256 MiB, the Guest OS will only see and utilize 1.75 GiB (
2 GiB - 256 MiB).
Why Use Per-VM Reserved Memory?
Guaranteed Overhead Headroom: By restricting the Guest OS from consuming the top slice of its configured allocation, you guarantee an isolated, un-evictable memory runway for host helper tasks.
Targeted Safety for Heavy Workloads: This mechanism is highly practical for mission-critical, high-performance, or special-purpose workloads (such as nested virtualization layers or intensive database engines). It effectively prevents the VM from running into host-level cgroup OOM termination by proactively limiting its internal usage boundaries, removing the risk of unexpected node-level kills.
Optimized Cluster Usability: Using per-VM reservations eliminates the major disadvantage of cranking up the global
additional-guest-memory-overhead-ratiofor the whole cluster. Instead of forcing a massive, wasteful memory overhead reservation across every idle or lightweight VM on your hosts, you can maintain a lean global default and surgically protect only the heavy workloads—striking an ideal balance between system density and ironclad stability.
Outcome: Guaranteed Workload Stability
By leveraging this dual-layer tunable memory architecture, Harvester fundamentally alters how host-level overhead is calculated, moving from rigid, generalized defaults to a precise, tiered enforcement model:
Total Memory Overhead = Auto-calculated Overhead * Ratio + Reserved Memory
Best Practices & Configuration Matrix
The following matrix showcases how combinations of Reserved Memory and the Overhead Ratio change the actual layout of the Guest OS space versus what Kubernetes reserves as a hard boundary.
| VM Configured Memory | Reserved Memory | additional-guest-memory-overhead-ratio | Guest OS Memory | POD Container Memory Limit | Total Memory Overhead |
|---|---|---|---|---|---|
| 2 Gi | not configured | "0.0" | 2 Gi - 100 Mi | 2 Gi + 240 Mi | ~340 Mi |
| 2 Gi | 256 Mi | "0.0" | 2 Gi - 256 Mi | 2 Gi + 240 Mi | ~500 Mi |
| 2 Gi | not configured | "1.0" | 2 Gi | 2 Gi + 240*1.0 Mi | ~240 Mi |
| 2 Gi | not configured | "3.0" | 2 Gi | 2 Gi + 240*3.0 Mi | ~720 Mi |
| 2 Gi | not configured | "1.5" | 2 Gi | 2 Gi + 240*1.5 Mi | ~360 Mi |
| 2 Gi | 256 Mi | "1.5" | 2 Gi - 256 Mi | 2 Gi + 240*1.5 Mi | ~620 Mi |
When optimizing your Harvester cluster to eliminate host-level container OOM events, use the following operational checklist to tailor your memory strategies:
For General Workloads:
- Stick to the default ratio of
1.5, or configure a slightly higher value of2.0. This ensures that standard Guest operating systems receive exactly the memory requested while scaling out a stable, predictable background overhead buffer across the cluster.
- Stick to the default ratio of
For High I/O and Storage-Heavy VMs:
- If you observe periodic KVM OOM events during massive backup windows, large-scale data syncs, or intensive disk read/write cycles, increase the individual VM's allocation or implement a targeted
Reserved Memoryconfiguration to safely expand the helper overhead pool.
- If you observe periodic KVM OOM events during massive backup windows, large-scale data syncs, or intensive disk read/write cycles, increase the individual VM's allocation or implement a targeted
For GPU Passthrough Workloads:
- Virtual machines utilizing direct hardware acceleration or GPU passthrough are prime candidates for explicit
Reserved Memorycarving. The underlying host-side device drivers and memory-mapped I/O (MMIO) windows for high-performance graphics hardware require a significantly higher, specialized memory footprint outside the guest OS space. Allocating dedicated per-VM reserved memory prevents driver-instigated cgroup allocation breaches, keeping both the hardware pipeline and the hypervisor completely stable.
- Virtual machines utilizing direct hardware acceleration or GPU passthrough are prime candidates for explicit
Quick Summary
The Problem: In Harvester's Kubernetes-native architecture, every virtual machine is bound by a strict Pod container limit. While this rigid cgroup boundary is essential for security, ensuring a single rogue or leaking VM can never starve neighboring workloads or crash the bare-metal host, it means heavy storage/network I/O, device drivers, or GPU passthrough can cause internal helper processes to breach this hard ceiling, triggering a sudden host-level OOM kill.
The Solution: Harvester eliminates these crashes without losing secure resource control using a dual-layer memory tuning strategy:
- Globally: The
additional-guest-memory-overhead-ratioscales out a safety cushion cluster-wide for newly created or migrated VMs. - Per-VM: The
Reserved Memorysetting surgically carves out a chunk of the VM's configured RAM exclusively for background helper tasks—preventing wasteful memory reservations across the cluster while safely anchoring high-performance, mission-critical workloads.
- Globally: The
Appendix: Lab Simulation — Manually Triggering the Host-Level OOM
For engineers looking to validate this behavior safely in a staging environment, you can replicate this multi-process cgroup breach. A detailed script and case study can be found in the Harvester Development Summary: OOM Investigation.
The simulation process highlights a fundamental truth about modern virtualization boundaries:
The Guest OS is Trustworthy: Testing shows that modern guest operating systems handle internal resource limits reliably. If a runaway application inside the guest OS eats up all available RAM, the guest kernel safely steps in and kills that specific process internally. The VM itself survives, and from the host's perspective, the virtual machine continues running normally.
The Host Cgroup Boundary is the Weak Link: The true host-level crash only happens if processes inside the host cgroup expand unexpectedly. If an infrastructure task or helper process inside the Pod container balloons, it consumes the memory buffer that KubeVirt set aside, causing the entire cgroup, the VM's carrier, to slam into the hard Kubernetes ceiling and trigger a host-level OOM kill.